What?
-
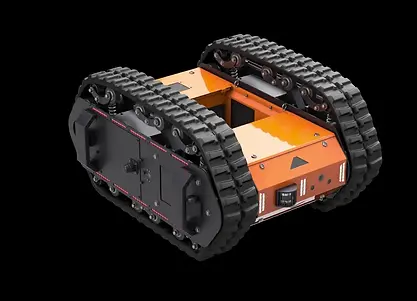
Design of a rugged robot that is able to carry payloads for geosensing application over terrains where humans cannot go
-
Extremely reliable robot that can resist impact, continue operation if flipped over
-
Includes a complete sensor suite to enable remote control and autonomous driving (LiDAR, cameras, GNSS, IMU)
How?
I created a novel track design that is symmetric, and fully suspended. It allows the robot to remain level while traversing extreme terrains, protecting internals from vibrations and guaranteeing a constant tension on the threads to prevent them from slipping-off
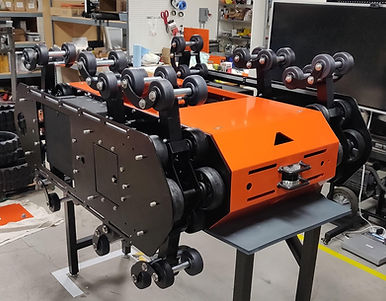
I created a robust design that provide ample space to integrate all the sensors and electronics needed for long continuous operations and a large payload bay to be able to integrate a wide range of geological sensors, even robotic arms
I selected components from cameras to motors and even communication antennas
As the lead designer and project manager, I lead over 20+ engineers in a multidisciplinary effort including mechatronics (mechanical, thermal, electrical, simulation), software (controls, AI, middleware, API), UX/UI, and testing (breadboard, bench, lab, rock yard and customer field site).
Results
-
Months-long testing campaign in a customer open-pit production mine meeting all customer defined KPIs
-
Robot capable of driving over rough terrain even at high slopes over 35 deg while remaining stable enough to be driven using the camera views only or autonomously using GPS-defined waypoints
-
Leading product for OffWorld gaining interest from mining companies all over the world
